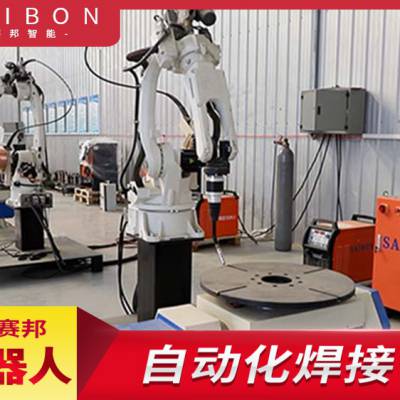
| 产品特性:紧凑型 | 是否进口:否 | 产地:山东青岛 |
| 工作范围:1400mm | 品牌:青岛赛邦 | 型号:QWTR-398 |
| 关节数量:6 | 控制系统:计划伺服控制,6轴同时控制 | 示教系统:示教再现 |
| 内存容量:1280 | 重量:550kg |
1.焊前清理,在零件坡口附近100mm的范围内进行清洗,在20mm的范围内用钢丝刷清洁;
2.用克丝钳将焊接部分剪平,把单丝两端固定在两电极上;
3.焊接工作电源选择,大截面导线用高电压,小截面用低电压;
4.将焊接电流调节到合适档位上;
5.编程示教,在机器人示教盒上选择输入/输出界面,检查机器人的工作中、工作完成信号是否复位,若未复位,将其复位;然后将机器人示教盒上的状态选择开关打到自动挡;
6.确认示教盒上的程序指针是否指向CELL主程序;
7.接通伺服电源:按下操作盒上的伺服上电按钮,使变位机伺服电源同时接通,相应的绿色伺服电源灯亮,并***报警复位的红灯熄灭,若没熄灭,则按几下此报警复位按钮;
8.按下启动按钮(2s),相应的指示灯同时点亮,工作站便进入自动运行工作状态。